0%
0 / 25 answered
Practice Test 9
•25 QuestionsQuestion
1 / 25
Q1
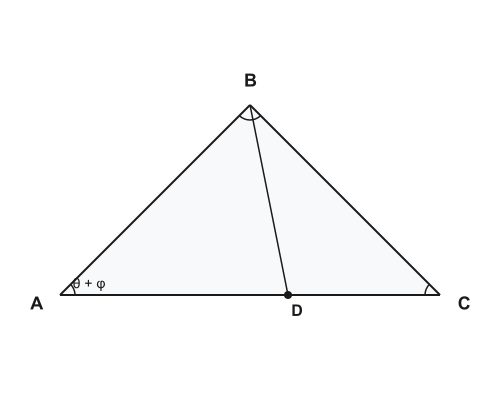
Which reasoning supports the angle addition formula?
In the diagram, triangle $ABC$ has point $D$ on segment $AC$. At vertex $A$, ray $AD$ splits $\angle BAC$ into two angles labeled $\theta$ (between $AB$ and $AD$) and $\varphi$ (between $AD$ and $AC$), so $\angle BAC=\theta+\varphi$. Segment $BD$ is drawn. A right-angle marker indicates $BD\perp AC$ at $D$.
Which statement proves an identity for $\sin(\theta+\varphi)$ using this construction?
Which reasoning supports the angle addition formula?
In the diagram, triangle $ABC$ has point $D$ on segment $AC$. At vertex $A$, ray $AD$ splits $\angle BAC$ into two angles labeled $\theta$ (between $AB$ and $AD$) and $\varphi$ (between $AD$ and $AC$), so $\angle BAC=\theta+\varphi$. Segment $BD$ is drawn. A right-angle marker indicates $BD\perp AC$ at $D$.
Which statement proves an identity for $\sin(\theta+\varphi)$ using this construction?